小型ロボット制御の課題成果
2024-09-06
情報・AI・データサイエンス学科では、4年生向けに制御工学を開講しています。今年度は、授業で学んだ理論を活用して実践する課題として、小型移動ロボットの面白い制御プログラムの開発に、3チームに分かれて取り組みました。それぞれのチームが開発した内容は、以下の通りです。
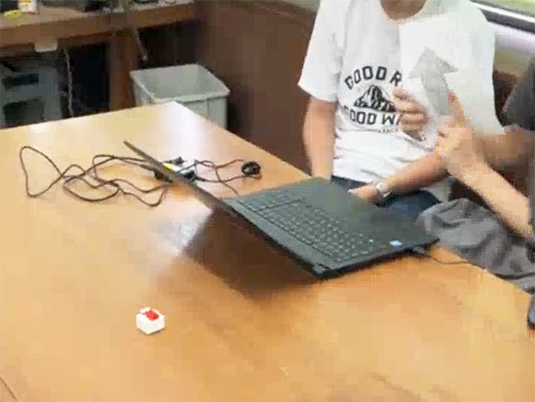
【操作者の心拍数に連動して移動するロボット】
ロボットの操作者の脈拍をセンサで計測し、心拍数の速さに応じて、ロボットの移動速度が変化する制御を実装しました。通常の移動ロボットは、コントローラの操作量によって速度が決まりますが、それに加えて操作者の心拍数も制御パラメータに加えることで、操作者の心理状態(緊張、リラックス等)に応じたロボットの制御量の調整への応用が期待できます。

【矢印を画像認識して移動するロボット】
コントローラを用いてロボットを制御するのではなく、カメラに矢印の方向を認識させることで、ロボットを移動させる制御方法を実装しました。コントローラに習熟する必要がなく、すぐにロボットを直感的に操作することへの応用が期待できます。
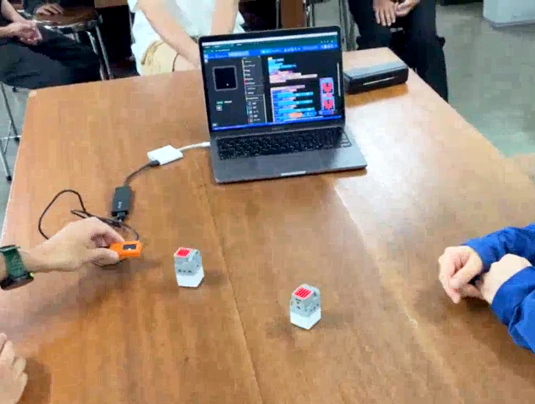
【コントローラの傾きに連動して2台同時に移動するロボット】
コントローラに内蔵された慣性センサを利用し、コントローラ全体を傾ける方向に、ロボットが移動するような直感的な操作方法を実装しました。また、2台のロボットは互いに同期して、同じように動くようにしています。コントローラに習熟する必要がなく、すぐに、複数のロボットを同時に、直感的に操作することへの応用が期待できます。
本授業の内容は,下記の研究の成果をもとに構成しました。
[1] Ryota Shibusawa, Mutsuhiro Nakashige, Katsutoshi Oe, “DualityBoard: An Asymmetric Remote Gaming Platform with Mobile Robots and the Digital Twins”, In Proceedings of the 2022 ACM/IEEE International Conference on Human-Robot Interaction (HRI ’22), pp.1035-1039, 2022年3月.
【リンク】https://dl.acm.org/doi/10.5555/3523760.3523930
[2] Ryota Shibusawa, Mutsuhiro Nakashige, Katsutoshi Oe, “MarioControl: An Intuitive Control Method for a Mobile Robot from a Third-Person Perspective”, In Companion Proceedings of the 2020 Conference on Interactive Surfaces and Spaces (ISS ’20) November(2020), pp.9-13, 2020年11月8日.
【リンク】https://dl.acm.org/doi/10.1145/3380867.3426205
[3] 渋沢良太, “移動ロボットとProjection mappingを用いたPlaywareの試作”, 第一工科大学研究報告 (36), pp.31-36, 2024年5月.
【リンク】https://daiichi-koudai.repo.nii.ac.jp/records/2000196
(情報・AI・データサイエンス学科)